
Histoire du moteur à explosion
L’architecture des moteurs : avant même que le principe du moteur à explosion soit découvert, on utilisait déjà au 17ème siècle le principe du monocylindre à mouvement alternatif, dans des machines à vapeur Il faudra attendre la fin du 19ème siècle pour avoir le moteur à explosion.
C’est en 1884 que Gottlieb Daimler mis au point le premier moteur 4 temps à carburation au monde dans un véhicule roulant.
Le premier moteur 4 temps, le monocylindre, est relativement simple. On ne peut pas parler à proprement dit d’architecture dans son cas puisqu’il est tout seul. On parlera surtout de sa disposition.
L’architecture des moteurs et le nombre de cylindres
Quand on décide de créer un moteur pour une moto, on ne se lance pas à l’aveuglette dans sa conception. Une énorme quantité de paramètres rentre en compte. Des plus importants, nous retiendrons les suivants:

Sa création et sa conception comprend:
Les performances recherchées :
- Les chevaux
- Le couple
- La faible consommation
- Le régime de rotation
N.B : Son mode d’utilisation dépendra souvent des performances recherchées.

Son encombrement et sa position :
- La position
- Sa longueur et sa largeur
- Si c’est un moteur en « V », son ouverture (en degrés)
- Une hauteur particulière pour le centre de gravité
- L’accessibilité mécanique est à ne pas négliger
Le design de la moto :
Le design est sûrement le facteur le plus délicat dans le choix d’un type de moteur sur une moto. En effet, le design contraint les ingénieurs à allier l’aspect visuel et le fonctionnel.

N.B : Même si il y a des règles de base à respecter, il faut savoir qu’un moteur « 4 temps » ou « 2 temps » fonctionne sur le principe de la multiplication des cylindres. Son principe restera toujours le même, que l’on ait 1 ou 10 cylindres, en « ligne » ou en « V ». On multiplira le nombre de « monocylindres » autant de fois que l’on en aura besoin.
L’architecture des moteurs : la disposition des cylindres
Si en théorie tout type d’architecture pour un moteur 2 temps ou 4 temps reste possible, la pratique limite grandement les possibilités. Que le moteur soit placé en longueur ou en largeur dans la moto.
On retrouvera quatre types distincts de moteur à explosion.
- Les monocylindres: le cylindre étant tout seul, on ne peut pas parler à proprement dit d’architecture, mais plutôt de position du cylindre.
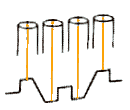
- Les moteurs en ligne: les cylindres sont disposés en ligne, généralement en position transversale sur la moto. De 2 à 6 cylindres, ont été abordés. On retrouve cependant principalement des moteurs de 2 à 4 cylindres.
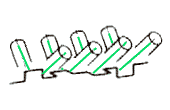
- Les moteurs en « V »: les cylindres sont disposés sur deux plans. On les retrouve de manière transversale, ou longitudinale. Les cylindres varient de 2 à 4. L’ouverture du « V » n’excède pas 180°.
- Le moteur rotatif qui adopte un architecture complètement différente: Rotatif
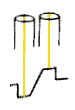
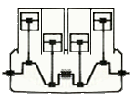 4 cylindres en ligne : vue de face |  4 cylindres en ligne : vue de côté |
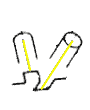
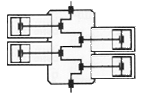 4 cylindres en V : vue de dessus | 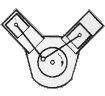 4 cylindres en V : vue de côté |
 Bi-cylindres en V : vue de dessus | 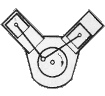 Bi-cylindres en V : vue de côté |
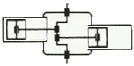
 Bi-cylindre à plat : vue de dessus | 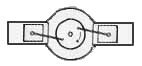 Bi-cylindre à plat : vue de côté |
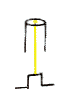
 Mono-cylindre : vue de face |  Mono-cylindre : vue de côté |



L’architecture du moteur : le nombre de cylindres
Si en théorie on peut mettre un nombre illimité de cylindres dans un moteur 2 temps ou 4 temps…
…dès que l’on tombe dans la mise en pratique, on limite grandement les possibilités.
- On retrouve principalement des moteurs variant de un à quatre cylindres.
- Quelques cinq et six cylindres qui sont plutôt rare dans le monde de la moto.
- Aucun sept cylindres.
- Des huits ou douze cylindres de manière très anecdotique et même souvent artisanale.
Plus le nombre de cylindre est croissant plus le poids, l’encombrement, et les pièces en mouvement augmentent.
N.B : A la différence des automobilistes, qui ont principalement des 4 cylindres en ligne… Le motard a l’avantage d’avoir le choix entre des moteurs de 1,2,3,4 ou 6 cylindres, à plat, en ligne, en « V »…
L’architecture des moteurs : le calage du moteur
Un cylindre s’articule autour du vilebrequin et décrit une rotation de 360°.
Plus on multiplie le nombre de cylindres plus on peut répartir les forces exercées par chacun des cylindres sur ce cycle de 360°.
Pour un même type de moteur et selon le comportement du moteur que l’on veut, on peut le caler de différentes façons.
Exemple : On trouvera des bicylindres calés à 360°, 270° et 180°… Tout dépendra ensuite de l’angle d’ouverture du « V »…
N.B : Il existe d’autre possibilités, nous énumérons ici les plus courantes
| Calage à 360° : Les monocylindres (fig.1) Les bicylindres à 90° (fig.2) Les bicylindres verticaux (fig.3) | (Fig. 1) | (Fig. 2) | (Fig. 3) |
| Calage à 270°: Les bicylindres à 45° (fig.1) Les bicylindres verticaux qui sont calés comme un bicylindre à 90° (fig.2) | (Fig. 1) | (Fig. 2) | |
| Calage à 180°: Les bicylindres verticaux (fig.1) Les quatre cylindres en ligne ou en « V » (fig.2) | (Fig. 1) | (Fig. 2) | |
| Calage à 120°: Les trois cylindres (fig.1) Les six cylindres en ligne ou en « V » (fig.2) | (Fig. 1) | (Fig. 2) | |
| Calage à 90°: Quelques rares V4 (fig.1) N.B: Bien que logique au niveau répartition des charges sur un cycle de 360°, il déséquilibre le moteur. | (Fig. 1) | ||
| Calage à 72°: Les cinq cylindres(fig.1) Les cinq cylindres sont plutôt rares en moto, mais ils offrent l’avantage d’être très « ronds ». Du fait de leur calage très serré. | (Fig.1) |
 Calage Mono 360° | 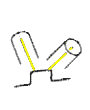 Bi en V 360° |
 Bi en V 180° |  Bi en ligne 360° |
 Bi en ligne 180° |  Tri en ligne 120° |
 Quatre en ligne 180° | 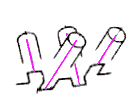 Quatre en V 90° |
 Quatre à plat 180° | 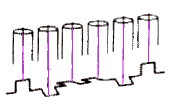 Six en ligne 120° |
 Six en V 60° | 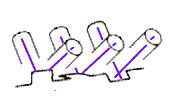 Six en V 120° |
Huit en V 180°